




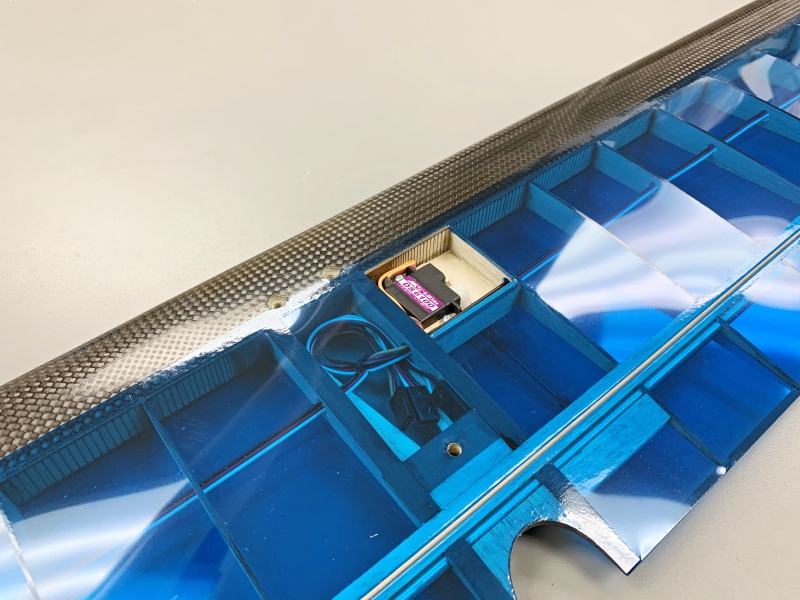

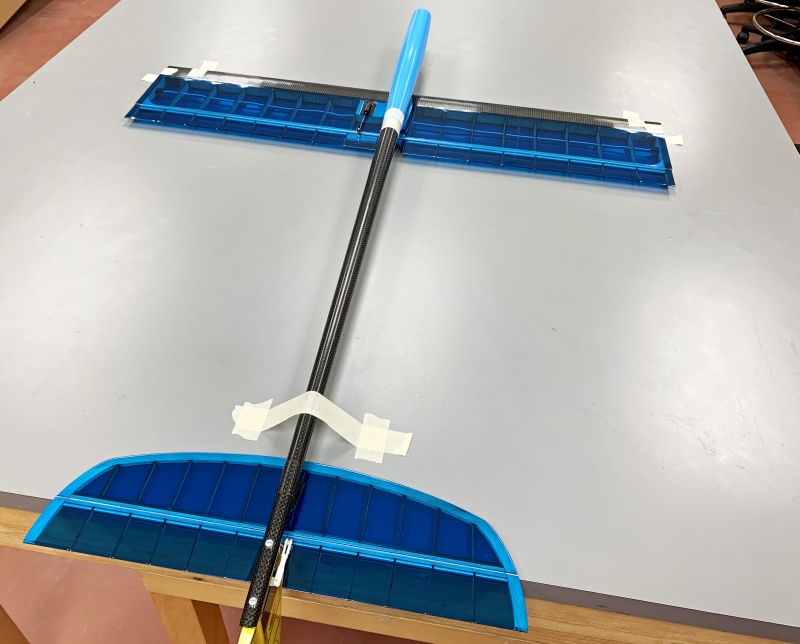
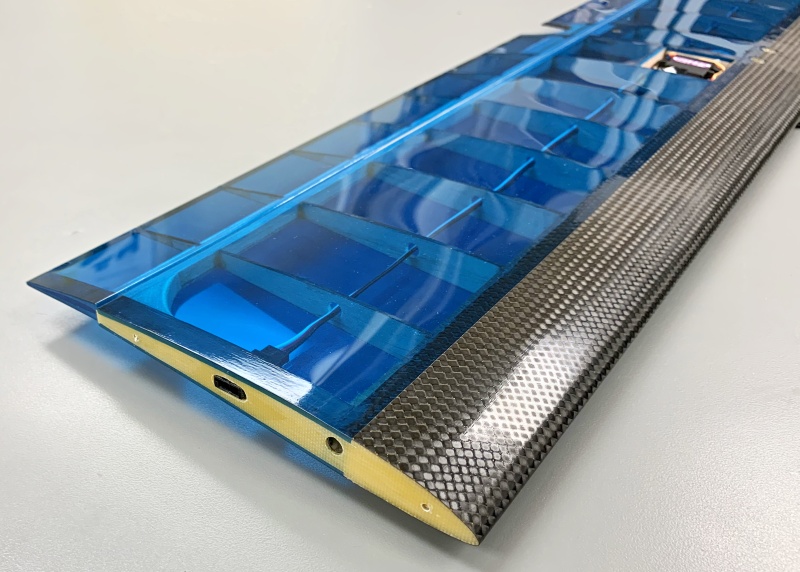
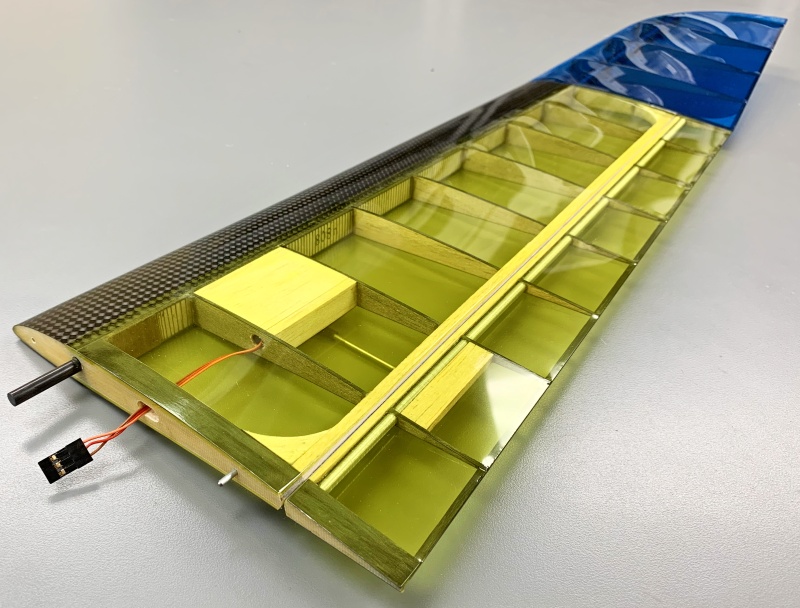

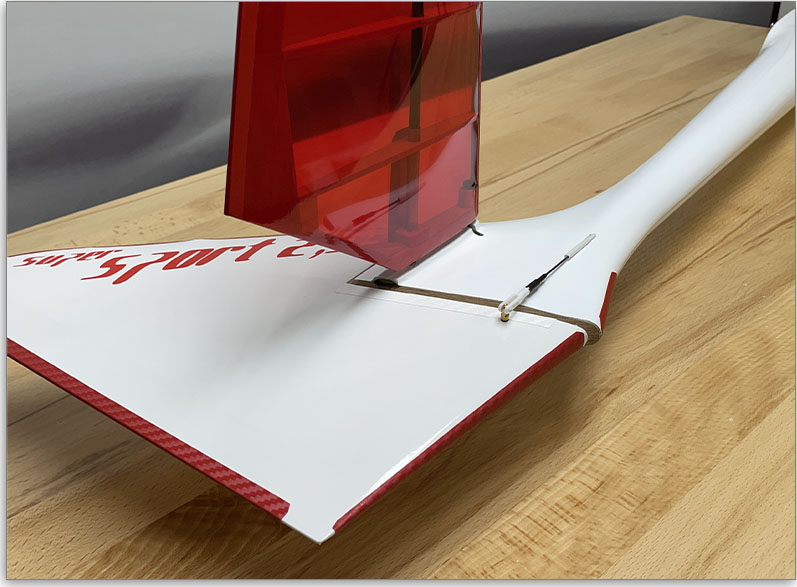
The Super Sport 2.35S/E is one of the most beautiful combinations of classic design and modern technology. The nostalgic shape is perfectly blended with modern building techniques to create an electric sailplane that performs as well as it looks. The white gel-coated fiberglass fuselage combined with high-tech CF main spare/leading edge tube wing and carbon/balsa built up tail parts come together to make the Super Sport a strong and light model. This model was designed and built to be a 21st century favorite. With its flap equipped, 2 piece wing and full flying elevator the Super Sport is one of the most impressive models that we have seen in quite some time. Each part is carefully handcrafted with meticulous attention to every detail. As soon as you open the box, you will find the Top Model build quality that we have come to expect.
Virtually perfect, extremely elegant combination of classic design and modern technology.
More Information:
Super Sport 2.35S/E Thermal/Electric Sailplane (ARC/ARF)
https://www.espritmodel.com/super-sport-2-35s-e-thermal-electric-sailplane-arc-arf.aspx
Included:
(1) AXi Cyclone 40/860 Motor
(1) Falcon 55HV ESC w/Telemetry
(1) RFM CF Turbo 40/5/6mm Folding Spinner
(1) Aeronaut 12×6 Folding Propeller
(1) Pro Power 2700 4S Battery







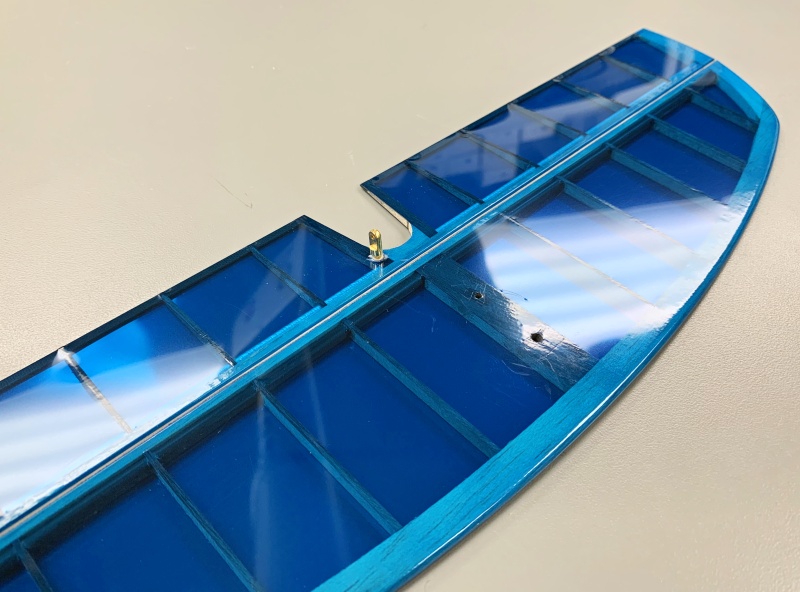
Store Demo, like NEW Albatros Classic Sport 3S/E electric sailplane battery and receiver ready. Model has been expertly built at our shop for video and demo flying. Recommended battery: 3300 3S
The Albatros is one of the most beautiful combinations of classic design and modern technology. The nostalgic shape is perfectly blended with modern building techniques to create an electric sailplane that performs as well as it looks. The white gel-coated fiberglass fuselage combined with classic balsa/ply D-tube wing and carbon/balsa built up tail parts come together to make the Albatros a strong and light model. Do not be fooled by the its retro looks. This model was designed and built to be a 21st century favorite. With its flap equipped, 3 piece wing and full flying elevator the Albatros is one of the most impressive models that we have seen in quite some time. Each part is carefully handcrafted with meticulous attention to every detail. As soon as you open the box, you will find the Top Model build quality that we have come to expect.
Currently has a Jeti EX R7 Plus receiver, MUI 75 A/V/mAh sensor, E2 Expander and EX Vario installed. If you would like us to leave equipment installed please add additional $250.00 to payment. (Call us for PayPal link)
Condition of item: Store Display, Demo Flown, Like NEW (See Video)
More information:
Albatros Classic Sport 3S/E Thermal/Electric Sailplane (ARC/ARF)
Included:
(1) Albatros w/CF canopy $625.00
(1) MVVS Outrunner/Inrunner Motor $95.00
(1) Jeti Spin Pro 44 ESC $95.00
(6) Hitec servos (ailerons, flaps, R/E) $150.00
(1) RFM CF White 40/5/8mm folding spinner $69.00
(1) Aeronaut 16×8 folding propeller $15.00
(1) Battery connector $3.00
(1) Servo extensions $30.00
(1) Hardware $20.00
(1) Building Services $350.00







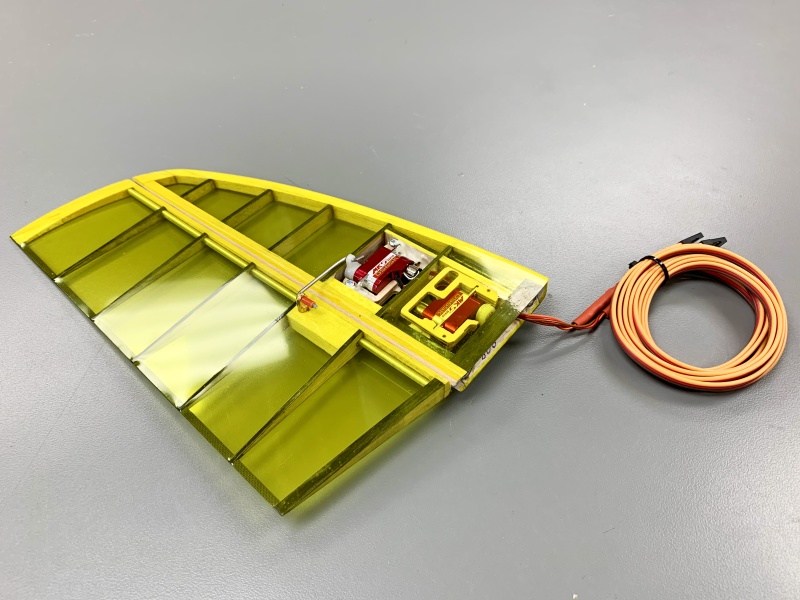
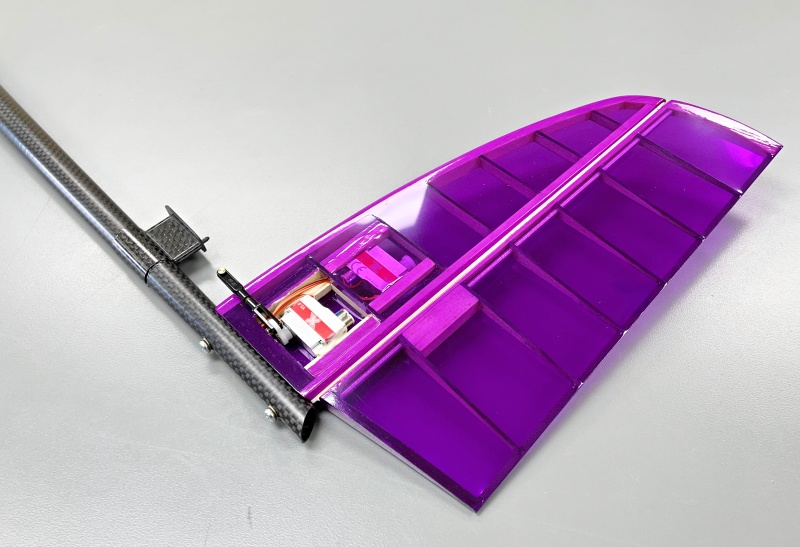
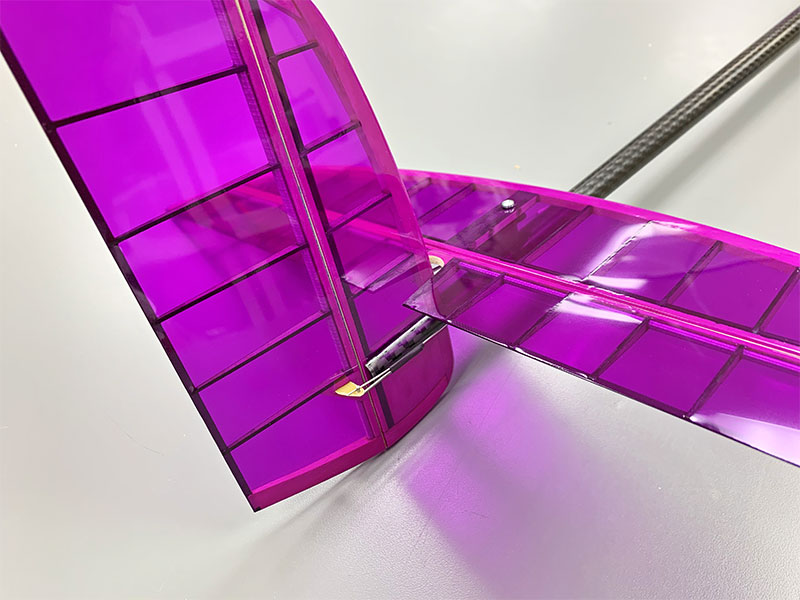
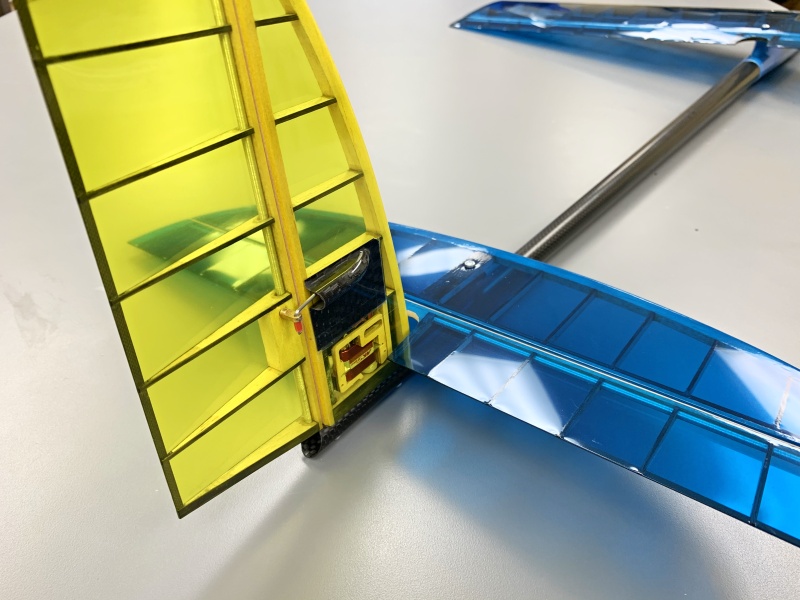
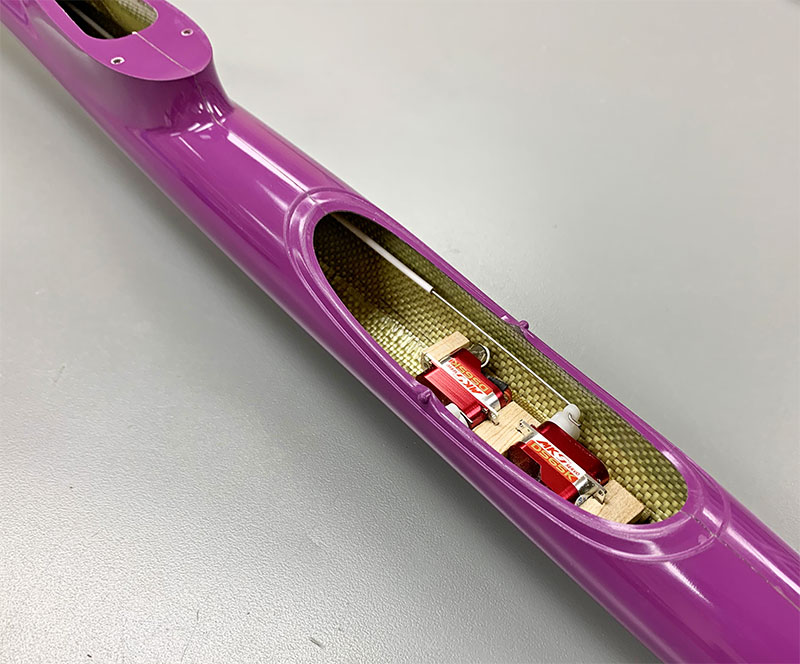
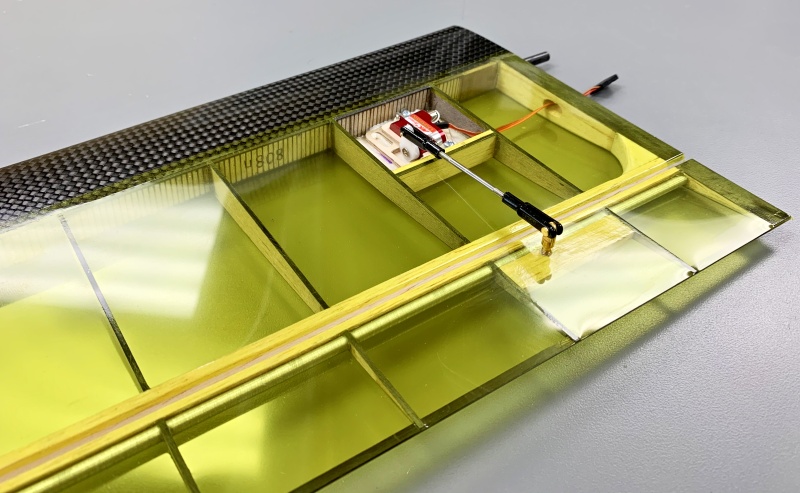
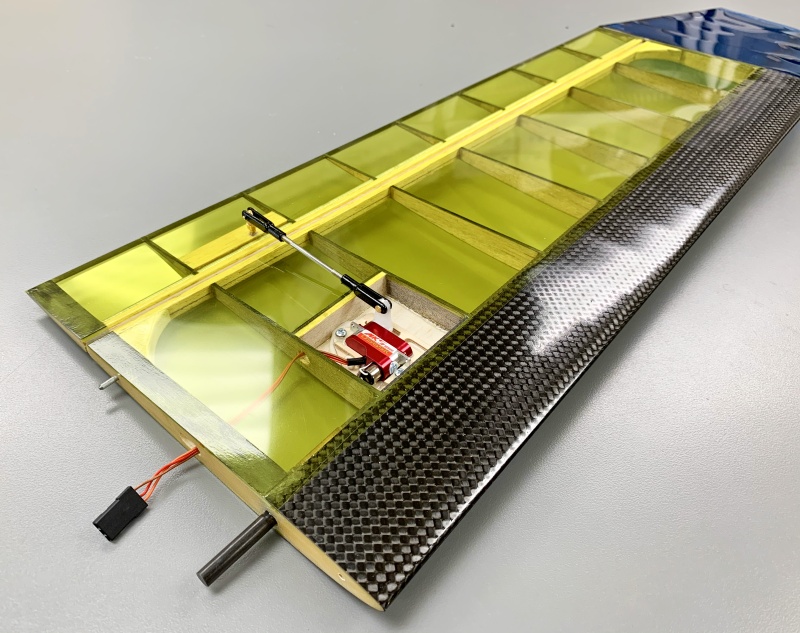
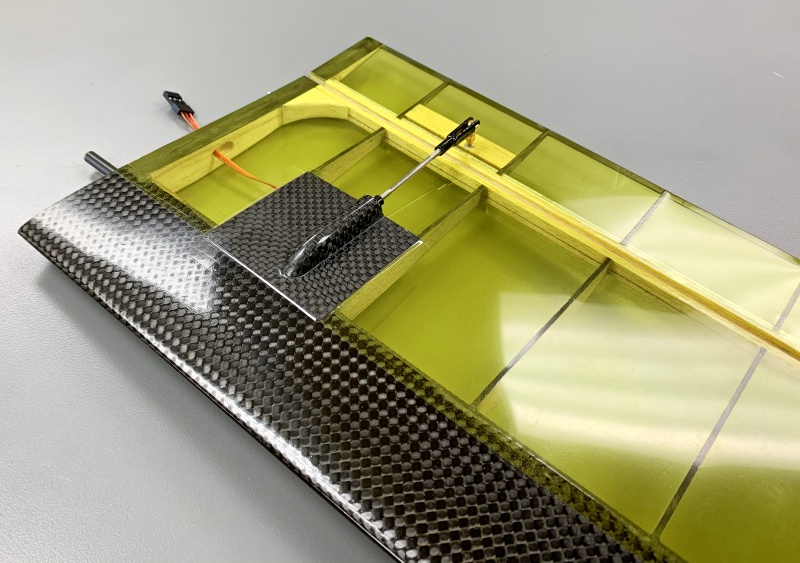
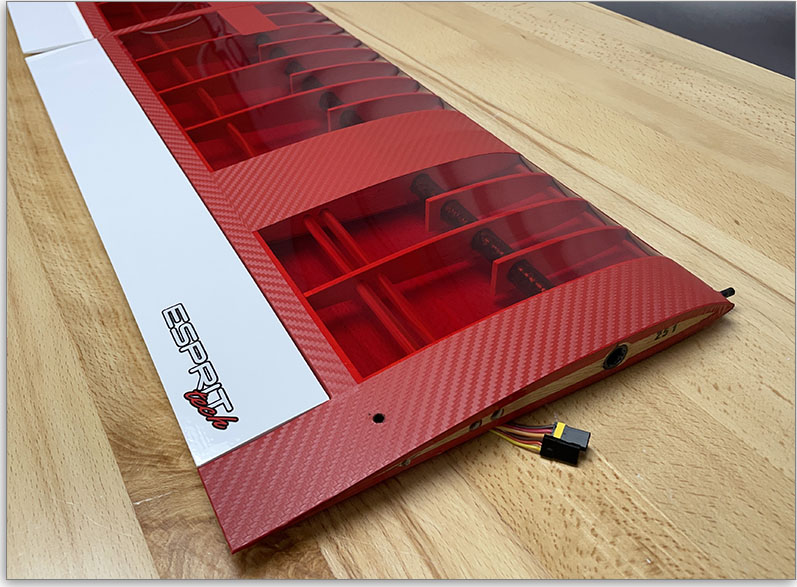
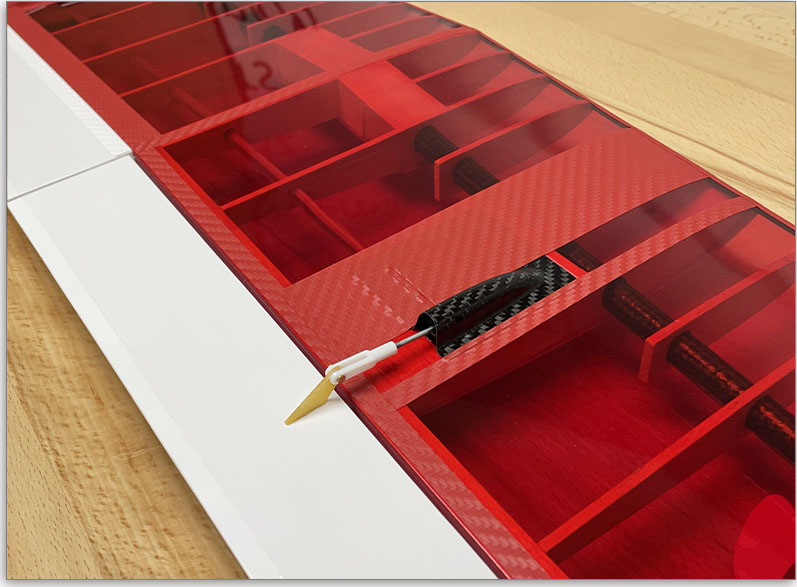
Store Demo, like NEW Super Sport 2.35S/E electric sailplane battery and receiver ready. Model has been expertly built at our shop for video and demo flying. Recommended battery: 2700 3S
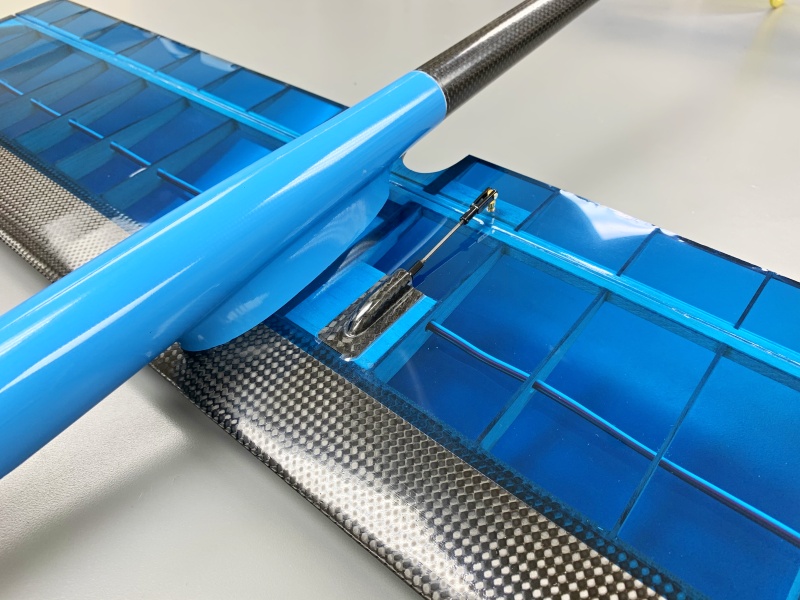
The Super Sport 2.35S/E is one of the most beautiful combinations of classic design and modern technology. The nostalgic shape is perfectly blended with modern building techniques to create an electric sailplane that performs as well as it looks. The white gel-coated fiberglass fuselage combined with high-tech CF main spare/leading edge tube wing and carbon/balsa built up tail parts come together to make the Super Sport a strong and light model. This model was designed and built to be a 21st century favorite. With its flap equipped, 2 piece wing and full flying elevator the Super Sport is one of the most impressive models that we have seen in quite some time. Each part is carefully handcrafted with meticulous attention to every detail. As soon as you open the box, you will find the Top Model build quality that we have come to expect.
Comes with Jeti EX R7 Plus receiver, if you would like us to leave it installed please include additional $85.00 payment.
Condition of item: Store Display, Demo Flown, Like NEW (See Video)
Included:
(1) Super Sport 2.35S/E $395.00
(1) MVVS Outrunner/Inrunner Motor $95.00
(1) Jeti Advance 40 Pro SB ESC $79.00
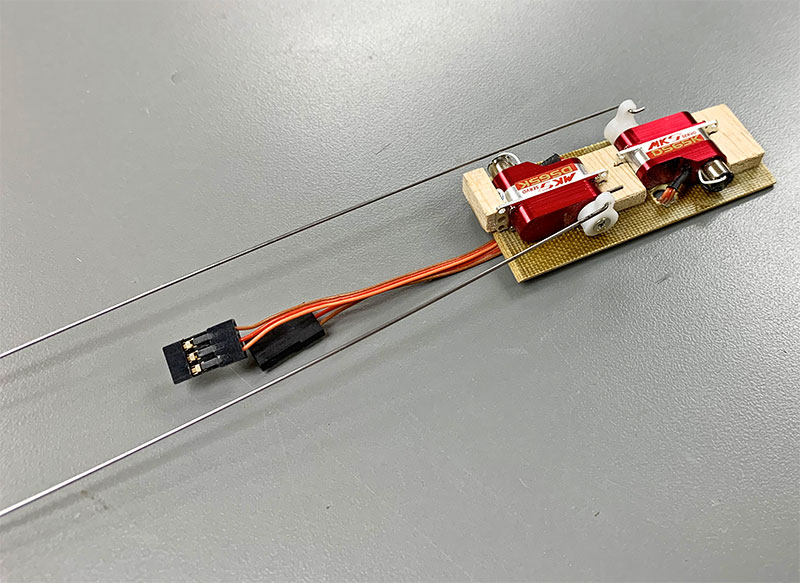
(6) Hitec HS-65M/85 servos (ailerons, flaps, R/E) $150.00
(1) BB Aluminum 40/5/8mm folding spinner $25.00
(1) Aeronaut folding propeller $15.00
(1) Battery connector $4.00
(1) Hardware, Frames, Extensions $50.00
(1) Building Services $250.00
Head over to the website here.






Check out this video shared by Opale Paramodels. It features the beautiful Ultra 3.5 paraglider preforming a spiral trick! The cool part though, it is from Pilot Mike’s perspective!
Check out the Ultra 3.5 Wing and more from Opale Paramodels here!

We all have been there, we check out at a website and then it asks you to create an account, but do you do it? Here is why we think you should.
When you create a register user on our site, you can access your order tracking information. There are many times when the tracking emails get sent to spam or junk. With the ability to log in, you can check status of your order and any tracking information associated with it.
Return/Warranty information at the tips of your fingers! Being able to log in to your account will allow you access to past orders. Here you can verify purchase date if you need to return or file a warranty claim.
In addition to important dates, have access to past orders helps you locate model information. Let’s say you need a spinner replacement, but do not remember what size you purchased. With a simple search of your past orders, it is possible to find what size your ordered in the past and purchase a replacement!
So, while it may seem as though creating an account with us lacks benefits, we hope you can see it is well worth it!
Watch this beautiful video of Mathieu of Opale Paramodels flying the beautiful Opale Ultra 3.5 Aerobatic Wing along the coast at sunset!
Check out all that Opale Paramodels has to offer here!
After a beautiful summer day, a short evening flight along the beach with the Ultra 3.5. As in the previous videos, the Ultra 3.5 demonstrates smoothness and performance, a real treat for demanding pilots. In this light configuration, a single 4S 5000mAh battery, guaranteeing, as in the previous video, more than 40min of motor autonomy.
– Opale Paramodels (YouTube Video Text)



Watch below!
With the addition of the new Elite Falcon 145HV/SB came the addition of the Flacon ESC cooling fan fit to that ESC. The new fan is designed to fit the Falcon 120/130HV and the 145HV/SB electronic speed controls.
Check it out here.

This airplane must go! It is new and in its original box!
The Hangar 9 XCub 60cc ARF is an officially licensed replica of the CubCrafters marvel. Working closely with the company, factory drawings of the full-scale aircraft were used to design the model. And, like the full-scale original, our giant-scale XCub model was developed by scrutinizing every element of the platform to make the tried-and-true design better at meeting the needs of the modeler. The result is a best-of-the-best contender for the RC pilot seeking a giant-scale airplane that can do it all. And even though it’s large in size, modern conveniences and performance factors make it easy to complete, easy to handle and easy to fly with rock-solid control. Laser-cut wood construction results in a rugged airframe designed to make onlookers second guess it from the real thing. Genuine UltraCote covering provides an exterior finish that replicates the CubCrafters original in its debut trim scheme and colors. Its outline is authentic with scale and other details that are practical and realistic, including sprung gear with aluminum wheels and tundra tires, a rugged tail wheel assembly, airfoil-shaped wing struts and operational LED lighting just to name a few.
From Horizon Hobby, Taken from FlyingGiants post CubCrafters XCub 60cc ARF (HAN5260) By Jim T. (2018)
Read the entire post here:
Selling for: $850.00 USD, plus shipping.
For inquires, please send an email to sales@esprittech.com.
We can send you a paypal link for payment.









The new Falcon 145HV/SW ESC by Elite is now in stock!
The Falcon product line represents advanced speed controllers for exclusive use in airplanes, drones, sailplanes or any kind of radio control application. With integrated telemetry and various possibilities of optional user configuration, the controllers offer high efficiency, low weight and precise motor control. The telemetry system in the Elite Falcon ESC lets you monitor in real time the Amperage (Amp), Voltage (V), and Capacity (mAh) consumed from the battery, ESC even calculates Power (W) output of the system. You can also measure the ESC Temperature and add external Motor Temperature and Propeller Positioning sensors. The Elite Falcon line of Brushless ESCs adds another revolutionary feature utilizing Backup Battery Integration. We have created a more robust hardware platform including increased cooling capability, smaller overall packaging, and selectable sensitivity to allow you to use any brushless motor that you choose. No matter which size you choose, the Elite Falcon series brushless speed controllers are right for your next project.
Check it out here.
